Miroslav Lichvar
2013-04-23 13:45:12 UTC
I've been experimenting with phc2sys and the clknetsim simulator to
find out how is the clock synchronization affected by changes in the
P, I constants with different jitters and clock stabilities, and I
thought others on this list might be interested in the results.
The instability of the clock frequency is called wander and it is
described by random-walk noise. A good value used to simulate an
average computer clock is around 0.5 ppb/s. However, there are
non-random effects like changes in the temperature due to variations
in the CPU load etc, which may quickly change the frequency by several
ppm. These effects are difficult to describe, so I simply use a larger
wander (up to 10 ppb/s) to make a room for them. In some older
experiments with NTP, when compared to results obtained on real HW,
this worked pretty well.
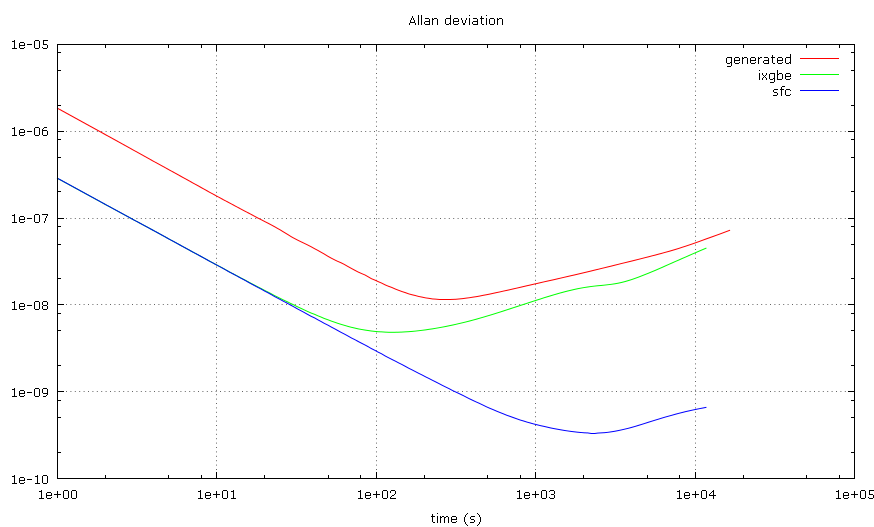
I'm also interested in how stable are the PTP clocks to allow better
configuration of the ptp4l servo. I've measured the Allan deviation
with two different NICs. One seems to have an ordinary oscillator
(wander slightly below 1 ppb/s), the other seems to have some kind of
stabilization (wander around 0.01 ppb/s). Here is a plot of the two
measured deviations and a simulation with 1us jitter and 1ppb/s wander
for comparison:
Loading Image...
The time interval in the Allan deviation plot where the -1 jitter
slope intersects the +1/2 wander slope is called Allan intercept. It
is a ratio of the jitter and wander.
The results of the servo tests are presented here in maps. I tried 3D
plots, but it wasn't very readable. The X axis is the P constant in
log10, the Y axis is the I constant in log10 and the Z axis is the
measured RMS time error of the simulated clock in decibels relative to
the lowest (best) value in the map. Please note that the absolute
values of jitter and wander are not really important here, only their
ratio - Allan intercept.
First is a map done with 10ns normally distributed jitter, 10ppb/s
wander and 1s update interval. It looks like this is the case the
current phc2sys default P, I (0.7, 0.3) are optimized for.
-4.0 -3.7 -3.3 -3.0 -2.7 -2.3 -2.0 -1.7 -1.3 -1.0 -0.7 -0.3 +0.0
-5.0 42 39 37 36 35 33 31 30 27 27 26 22 19
-4.7 40 38 36 34 33 31 30 28 26 25 24 22 19
-4.3 39 35 35 33 32 30 28 26 24 23 21 18 18
-4.0 37 34 33 31 30 28 27 25 23 22 20 18 16
-3.7 34 33 31 30 28 26 25 23 21 20 17 16 15
-3.3 34 31 29 27 26 24 23 21 20 18 16 14 13
-3.0 31 29 29 26 24 23 21 20 18 16 15 13 11
-2.7 31 27 27 25 24 21 20 18 16 15 13 11 10
-2.3 29 27 25 23 21 20 18 16 15 13 11 10 8
-2.0 27 24 23 21 20 18 16 15 13 11 10 8 6
-1.7 24 22 21 19 18 16 15 13 11 10 8 6 5
-1.3 22 21 19 18 17 14 13 11 10 8 6 5 3
-1.0 22 19 18 16 15 13 11 10 8 6 5 3 2
-0.7 18 18 17 14 13 11 10 8 6 5 3 2 0
-0.3 18 17 15 12 12 10 9 7 5 4 2 1 0
+0.0 18 16 14 13 12 10 8 7 5 3 2 1 1
This one is with 100us jitter, 10ppb/s wander and 1s interval. The
best I constant now becomes impractical as it will take hours
for the servo to converge.
-4.0 -3.7 -3.3 -3.0 -2.7 -2.3 -2.0 -1.7 -1.3 -1.0 -0.7 -0.3 +0.0
-5.0 15 12 10 8 6 4 3 2 2 3 5 7 9
-4.7 11 10 9 6 4 3 2 1 1 3 5 6 9
-4.3 9 8 6 5 3 2 1 0 1 3 5 6 9
-4.0 7 7 6 4 3 1 0 0 1 3 5 6 9
-3.7 10 9 6 4 3 2 1 0 1 3 5 6 9
-3.3 10 8 8 6 4 3 1 1 2 3 5 6 9
-3.0 12 11 9 8 6 5 3 2 2 3 5 6 9
-2.7 15 13 11 9 7 6 5 3 3 3 5 6 9
-2.3 16 13 13 11 10 8 6 5 4 4 5 6 9
-2.0 17 17 15 12 11 9 8 6 5 4 5 7 9
-1.7 20 17 16 15 13 11 10 8 6 5 5 7 9
-1.3 19 18 18 16 14 13 11 9 8 7 6 7 9
-1.0 18 18 18 17 16 15 13 11 10 8 7 7 9
-0.7 16 16 16 16 16 15 14 13 11 10 9 8 9
-0.3 15 15 15 14 14 14 14 14 13 11 10 10 10
+0.0 13 13 13 13 13 13 13 13 13 12 12 11 11
To see how the results change with different update intervals, these
three are with 10ns jitter, 1ppb/s wander, and 100s, 1s and 0.01s
update intervals respectively. The sudden jump to 45-47 shows where
the servo becomes unstable.
-3.0 -2.7 -2.3 -2.0 -1.7 -1.3 -1.0 -0.7 -0.3 +0.0 +0.3 +0.7 +1.0
-3.0 10 9 7 5 46 46 46 46 45 45 45 45 45
-2.7 9 7 5 3 46 46 46 46 46 45 45 45 45
-2.3 7 5 3 2 46 46 46 46 46 46 45 45 45
-2.0 5 3 2 0 46 46 46 46 46 45 45 45 45
-1.7 3 2 0 46 46 46 46 46 45 46 45 45 45
-1.3 46 46 46 46 46 46 46 46 46 45 45 45 45
-1.0 46 46 46 46 46 46 46 46 46 46 45 45 45
-0.7 46 46 46 46 45 46 46 46 45 46 45 45 45
-0.3 46 46 46 46 45 46 45 46 45 45 45 45 45
+0.0 45 46 46 46 46 46 45 45 45 45 45 45 45
-3.0 -2.7 -2.3 -2.0 -1.7 -1.3 -1.0 -0.7 -0.3 +0.0 +0.3 +0.7 +1.0
-3.0 19 18 16 15 13 11 10 9 7 4 46 46 46
-2.7 19 16 15 13 12 10 8 7 5 4 47 46 46
-2.3 18 14 13 11 10 8 6 5 4 3 47 47 46
-2.0 15 14 12 10 8 6 5 3 2 2 47 47 47
-1.7 14 11 10 8 6 5 3 2 1 2 47 47 47
-1.3 13 10 8 6 5 3 2 1 0 2 47 47 47
-1.0 10 11 8 6 5 3 2 0 0 2 47 47 47
-0.7 11 11 8 7 5 4 2 1 1 2 47 47 47
-0.3 13 11 10 9 7 5 4 2 2 3 47 47 47
+0.0 15 14 13 10 9 7 6 4 4 5 47 47 47
-3.0 -2.7 -2.3 -2.0 -1.7 -1.3 -1.0 -0.7 -0.3 +0.0 +0.3 +0.7 +1.0
-3.0 36 35 28 31 23 23 10 7 6 2 1 14 15
-2.7 31 35 27 30 10 21 7 4 3 2 1 1 9
-2.3 28 31 24 31 23 16 7 4 2 1 1 2 2
-2.0 21 29 29 25 21 7 5 3 2 1 0 2 3
-1.7 26 28 27 26 18 15 4 4 2 1 1 1 4
-1.3 21 18 29 26 12 13 9 4 3 2 1 2 3
-1.0 27 23 23 21 14 10 9 5 4 4 2 2 4
-0.7 19 18 25 21 13 14 9 8 6 5 3 3 4
-0.3 22 21 12 20 17 12 12 9 9 6 5 4 4
+0.0 20 17 14 16 13 15 12 11 9 8 6 5 5
More data and the script which was used to generate it is available
here:
http://mlichvar.fedorapeople.org/clknetsim/ptp/pi_search/
I was wondering how useful it would be to have a new servo parameter
for the Allan intercept and set the P, I constants automatically
according the intercept and measured clock update interval. What do
you think?
find out how is the clock synchronization affected by changes in the
P, I constants with different jitters and clock stabilities, and I
thought others on this list might be interested in the results.
The instability of the clock frequency is called wander and it is
described by random-walk noise. A good value used to simulate an
average computer clock is around 0.5 ppb/s. However, there are
non-random effects like changes in the temperature due to variations
in the CPU load etc, which may quickly change the frequency by several
ppm. These effects are difficult to describe, so I simply use a larger
wander (up to 10 ppb/s) to make a room for them. In some older
experiments with NTP, when compared to results obtained on real HW,
this worked pretty well.
I'm also interested in how stable are the PTP clocks to allow better
configuration of the ptp4l servo. I've measured the Allan deviation
with two different NICs. One seems to have an ordinary oscillator
(wander slightly below 1 ppb/s), the other seems to have some kind of
stabilization (wander around 0.01 ppb/s). Here is a plot of the two
measured deviations and a simulation with 1us jitter and 1ppb/s wander
for comparison:
Loading Image...
The time interval in the Allan deviation plot where the -1 jitter
slope intersects the +1/2 wander slope is called Allan intercept. It
is a ratio of the jitter and wander.
The results of the servo tests are presented here in maps. I tried 3D
plots, but it wasn't very readable. The X axis is the P constant in
log10, the Y axis is the I constant in log10 and the Z axis is the
measured RMS time error of the simulated clock in decibels relative to
the lowest (best) value in the map. Please note that the absolute
values of jitter and wander are not really important here, only their
ratio - Allan intercept.
First is a map done with 10ns normally distributed jitter, 10ppb/s
wander and 1s update interval. It looks like this is the case the
current phc2sys default P, I (0.7, 0.3) are optimized for.
-4.0 -3.7 -3.3 -3.0 -2.7 -2.3 -2.0 -1.7 -1.3 -1.0 -0.7 -0.3 +0.0
-5.0 42 39 37 36 35 33 31 30 27 27 26 22 19
-4.7 40 38 36 34 33 31 30 28 26 25 24 22 19
-4.3 39 35 35 33 32 30 28 26 24 23 21 18 18
-4.0 37 34 33 31 30 28 27 25 23 22 20 18 16
-3.7 34 33 31 30 28 26 25 23 21 20 17 16 15
-3.3 34 31 29 27 26 24 23 21 20 18 16 14 13
-3.0 31 29 29 26 24 23 21 20 18 16 15 13 11
-2.7 31 27 27 25 24 21 20 18 16 15 13 11 10
-2.3 29 27 25 23 21 20 18 16 15 13 11 10 8
-2.0 27 24 23 21 20 18 16 15 13 11 10 8 6
-1.7 24 22 21 19 18 16 15 13 11 10 8 6 5
-1.3 22 21 19 18 17 14 13 11 10 8 6 5 3
-1.0 22 19 18 16 15 13 11 10 8 6 5 3 2
-0.7 18 18 17 14 13 11 10 8 6 5 3 2 0
-0.3 18 17 15 12 12 10 9 7 5 4 2 1 0
+0.0 18 16 14 13 12 10 8 7 5 3 2 1 1
This one is with 100us jitter, 10ppb/s wander and 1s interval. The
best I constant now becomes impractical as it will take hours
for the servo to converge.
-4.0 -3.7 -3.3 -3.0 -2.7 -2.3 -2.0 -1.7 -1.3 -1.0 -0.7 -0.3 +0.0
-5.0 15 12 10 8 6 4 3 2 2 3 5 7 9
-4.7 11 10 9 6 4 3 2 1 1 3 5 6 9
-4.3 9 8 6 5 3 2 1 0 1 3 5 6 9
-4.0 7 7 6 4 3 1 0 0 1 3 5 6 9
-3.7 10 9 6 4 3 2 1 0 1 3 5 6 9
-3.3 10 8 8 6 4 3 1 1 2 3 5 6 9
-3.0 12 11 9 8 6 5 3 2 2 3 5 6 9
-2.7 15 13 11 9 7 6 5 3 3 3 5 6 9
-2.3 16 13 13 11 10 8 6 5 4 4 5 6 9
-2.0 17 17 15 12 11 9 8 6 5 4 5 7 9
-1.7 20 17 16 15 13 11 10 8 6 5 5 7 9
-1.3 19 18 18 16 14 13 11 9 8 7 6 7 9
-1.0 18 18 18 17 16 15 13 11 10 8 7 7 9
-0.7 16 16 16 16 16 15 14 13 11 10 9 8 9
-0.3 15 15 15 14 14 14 14 14 13 11 10 10 10
+0.0 13 13 13 13 13 13 13 13 13 12 12 11 11
To see how the results change with different update intervals, these
three are with 10ns jitter, 1ppb/s wander, and 100s, 1s and 0.01s
update intervals respectively. The sudden jump to 45-47 shows where
the servo becomes unstable.
-3.0 -2.7 -2.3 -2.0 -1.7 -1.3 -1.0 -0.7 -0.3 +0.0 +0.3 +0.7 +1.0
-3.0 10 9 7 5 46 46 46 46 45 45 45 45 45
-2.7 9 7 5 3 46 46 46 46 46 45 45 45 45
-2.3 7 5 3 2 46 46 46 46 46 46 45 45 45
-2.0 5 3 2 0 46 46 46 46 46 45 45 45 45
-1.7 3 2 0 46 46 46 46 46 45 46 45 45 45
-1.3 46 46 46 46 46 46 46 46 46 45 45 45 45
-1.0 46 46 46 46 46 46 46 46 46 46 45 45 45
-0.7 46 46 46 46 45 46 46 46 45 46 45 45 45
-0.3 46 46 46 46 45 46 45 46 45 45 45 45 45
+0.0 45 46 46 46 46 46 45 45 45 45 45 45 45
-3.0 -2.7 -2.3 -2.0 -1.7 -1.3 -1.0 -0.7 -0.3 +0.0 +0.3 +0.7 +1.0
-3.0 19 18 16 15 13 11 10 9 7 4 46 46 46
-2.7 19 16 15 13 12 10 8 7 5 4 47 46 46
-2.3 18 14 13 11 10 8 6 5 4 3 47 47 46
-2.0 15 14 12 10 8 6 5 3 2 2 47 47 47
-1.7 14 11 10 8 6 5 3 2 1 2 47 47 47
-1.3 13 10 8 6 5 3 2 1 0 2 47 47 47
-1.0 10 11 8 6 5 3 2 0 0 2 47 47 47
-0.7 11 11 8 7 5 4 2 1 1 2 47 47 47
-0.3 13 11 10 9 7 5 4 2 2 3 47 47 47
+0.0 15 14 13 10 9 7 6 4 4 5 47 47 47
-3.0 -2.7 -2.3 -2.0 -1.7 -1.3 -1.0 -0.7 -0.3 +0.0 +0.3 +0.7 +1.0
-3.0 36 35 28 31 23 23 10 7 6 2 1 14 15
-2.7 31 35 27 30 10 21 7 4 3 2 1 1 9
-2.3 28 31 24 31 23 16 7 4 2 1 1 2 2
-2.0 21 29 29 25 21 7 5 3 2 1 0 2 3
-1.7 26 28 27 26 18 15 4 4 2 1 1 1 4
-1.3 21 18 29 26 12 13 9 4 3 2 1 2 3
-1.0 27 23 23 21 14 10 9 5 4 4 2 2 4
-0.7 19 18 25 21 13 14 9 8 6 5 3 3 4
-0.3 22 21 12 20 17 12 12 9 9 6 5 4 4
+0.0 20 17 14 16 13 15 12 11 9 8 6 5 5
More data and the script which was used to generate it is available
here:
http://mlichvar.fedorapeople.org/clknetsim/ptp/pi_search/
I was wondering how useful it would be to have a new servo parameter
for the Allan intercept and set the P, I constants automatically
according the intercept and measured clock update interval. What do
you think?
--
Miroslav Lichvar
Miroslav Lichvar